Multi- Domain Robot Command and Control Station (MDRC2)
Tools
Website:
Space Applications Services • ROS & JAUS Support:
- ROS compliant with a wide set of commercial and research platforms. Easy to add and remove modules for robot specific background processing.
- JAUS compliant (Military and law enforcement) for unmanned systems.
- Dynamic discovery of robot in the network with appropriate robot configuration .
- Communication data flows QoS management from the C2I.
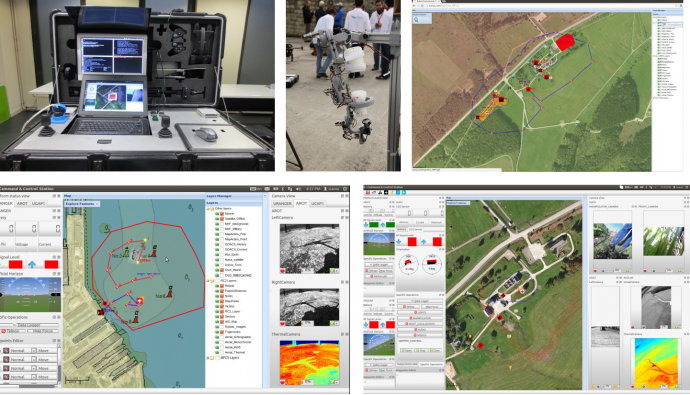
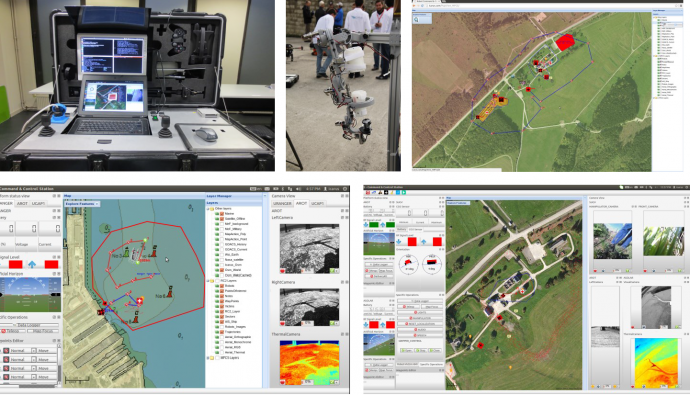
• Hardware & GUI
- Rugged hardware with internal power (~6hrs), communication equipment, industrial joystick interface, bluetooth gamepad and an exoskeleton for intuitive control of a slave robot arm.
- Automated discovery module identifies robots on the network and dynamically configures GUI.
- Sensor visualizations – Global pose, inertial measurements, point clouds, wireless quality, battery level, cameras and video streams.
- MapView: Interface based on web technology (Open Layers). Displays map layers, vectorial data annotation and inspection tools including robots specifc information such as trajectories, waypoints, polygons, images etc).
• Local GIS
- Hosts a locally configured geoserver with offline vectorial and raster maps.
- Support for OGC WMS and WFS (with transaction capability).
- Custom support in DB to store sensor data such as robot global pose, images & videos, point clouds, robot heath data etc. using WFS-t.
- A server for providing situational awareness maps on portable devices within a browser.
For more information, we invite you to look the following video prepared by the ICARUS consortium: https://www.youtube.com/watch?feature=player_embedded&v=afgm9Sc-jwM
Related:












