Project Results
Tools

Unmanned Maritime Capsule
The Unmanned capsule is a small size autonomous surface vehicle designed for search and rescue operations at sea.

Large Unmanned Ground Vehicle
METALLIANCE, based in France, built Unmanned Ground Vehicles (called UGV), targeted for building manipulation and the detection of survivors in disasters-stricken areas (Indoor victim search). Its chassis is made of reinforced steel and it is equipped with low ground pressure tracks.

Training ans Support system
Training and Support system: data from robotic sources are gathered by the mobile platform and are processed, distributed over network. It is based on the NVIDIA GRID compatible server with CITRIX middle-ware. In current version Supermicro RZ-1240i-NVK2 model is used. The system provides computation power necessary for building 3D models of the environment on-line and visualizing them for multiple users (Software as a Service model).

Rapid deployment unmanned aerial vehicle team for assisting international relief teams
As a research group embedded in a military university working in close collaboration with multiple end-user organizations, the Unmanned Vehicle Centre has a favorable position linking research and end-users. As a result, we are able to offer advanced state-of-the-art support tools for relief operations. These tools consist of Unmanned Aerial Vehicles (a.o. Microdrones MD4-1000) and trained operators with field experience on assisting international relief teams for crisis management operations, as proven during our deployment in Bosnia-Herzegovina.

Rapid mapping tools, combining data from aerial and ground based assets
Accurate 3D mapping tools are provided by a number of service providers, relying on land-based (via a geodetic survey) or aerial-based (via manned our unmanned aircraft) mapping. Coming forth out of years of research on this subject in multiple research projects like ICARUS and TIRAMISU, the Unmanned Vehicle Centre is now able to present an integrated toolbox for combined ground and aerial mapping. Use this toolbox to bring together your environmental datasets, land-based and air-based.

X-LINK middleware software for tactical communications
The X-LINK middleware has been the key piece enabling interoperable and resilient tactical communications in the ICARUS scenario of crisis response operations covering air/sea/land portable and mobile nodes. The X-LINK middleware stack has been designed with fast deployment, interoperability and performance-based real-time self-management capabilities in mind.
GEOBEAM tool for tactical communications planning and management
In the frame of ICARUS Integrasys has extended the capabilities of its GEOBEAM product —so far used for satellite networks planning— to support planning, monitoring and optimisation of integrated multi-radio tactical communication networks addressing the new demands of high-tech search and rescue teams.

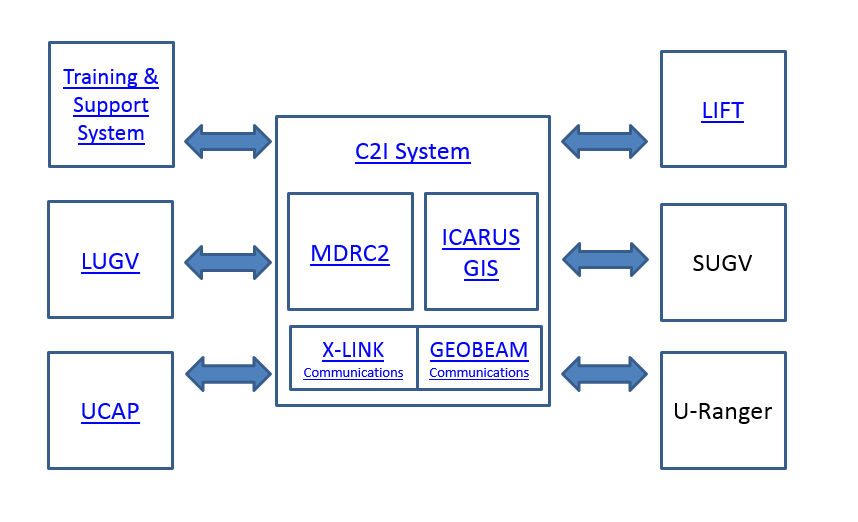
Multi- Domain Robot Command and Control Station (MDRC2)
• ROS & JAUS Support:
- ROS compliant with a wide set of commercial and research platforms. Easy to add and remove modules for robot specific background processing.
- JAUS compliant (Military and law enforcement) for unmanned systems.
- Dynamic discovery of robot in the network with appropriate robot configuration .
- Communication data flows QoS management from the C2I.
• Hardware & GUI
.png)
Lightweight and Integrated platform for Flight Technologies (LIFT)
The Eurecat Unmanned Aerial Vehicle is a multirotor system that has been optimized for search and rescue (SAR) operations (see presentation video here )

Icarus GIS Virtual Machine
The ICARUS GIS virtual machine provides geospatial capabilities (sharing, visualization, processing and edition of geospatial data) and supports all C2I operations. The virtual machine is run on each C2I integrated laptop and is comprised of 4 main components that require specific configuration: